← Back to all projects






Philadelphia, PA — Maritime Defense HackathonMarch 2026
Seawatch
Mesh network of low-cost, rapidly deployable buoys capable of detecting and triangulating vessels, torpedoes, and unmanned vehicles both above and below the water surface.
Skills
Acoustic Sensing, Mesh Networking, Marine Electronics, Hydrophones, Triangulation, Rapid Prototyping, Machining, Defense Technology, Hardware Design
Seawatch was built over a single weekend at a maritime defense hackathon in Philadelphia, sponsored by defense startup Albacore and supported by the US and Ukrainian militaries, Ukrainian VCs, the Senator of Pennsylvania, and the Mayor of Philadelphia. Competing alongside Jago Stokes, Aiden Suganuma, Jonah Stein, and Ryan Petrauskas under the team name Seawatch, we won the Shipyard Infrastructure Track — one of three winning tracks at the event.
The core idea behind Seawatch is simple but powerful: existing maritime surveillance infrastructure is expensive, slow to deploy, and hard to scale. Our buoys are designed to be cheap, modular, and mesh-networked, allowing rapid deployment across large bodies of water. Working together, they can triangulate the position of boats, torpedoes, and unmanned vehicles operating on and beneath the surface.
Our first version was built under hackathon conditions over the weekend using microphones as the primary sensing element. The judges and the Albacore team were impressed enough that they invited our team to stay in Philadelphia for the rest of the week to develop the idea further and co-submit for a government contract due that Friday — on equal footing with them, which was a significant show of confidence in what we had built.
I came back early in the week to machine a new anchor for our V2 at Duke — around 8 pounds of solid metal, going nowhere. The rest of the team stayed in Philadelphia throughout. I returned Wednesday to rejoin for the final push. With a $20,000 hardware budget for the week, V2 was a meaningful upgrade: a larger form factor accommodating proper hydrophones in place of the microphones used in V1, significantly improving underwater detection capability.
This is one of the most exciting projects I've been a part of — the combination of real-world defense relevance, the speed at which we built it, and the doors it opened made for an unforgettable week.
Buoy V2 deployed and floating
Seawatch V1 buoy prototype
Buoy setup and deployment
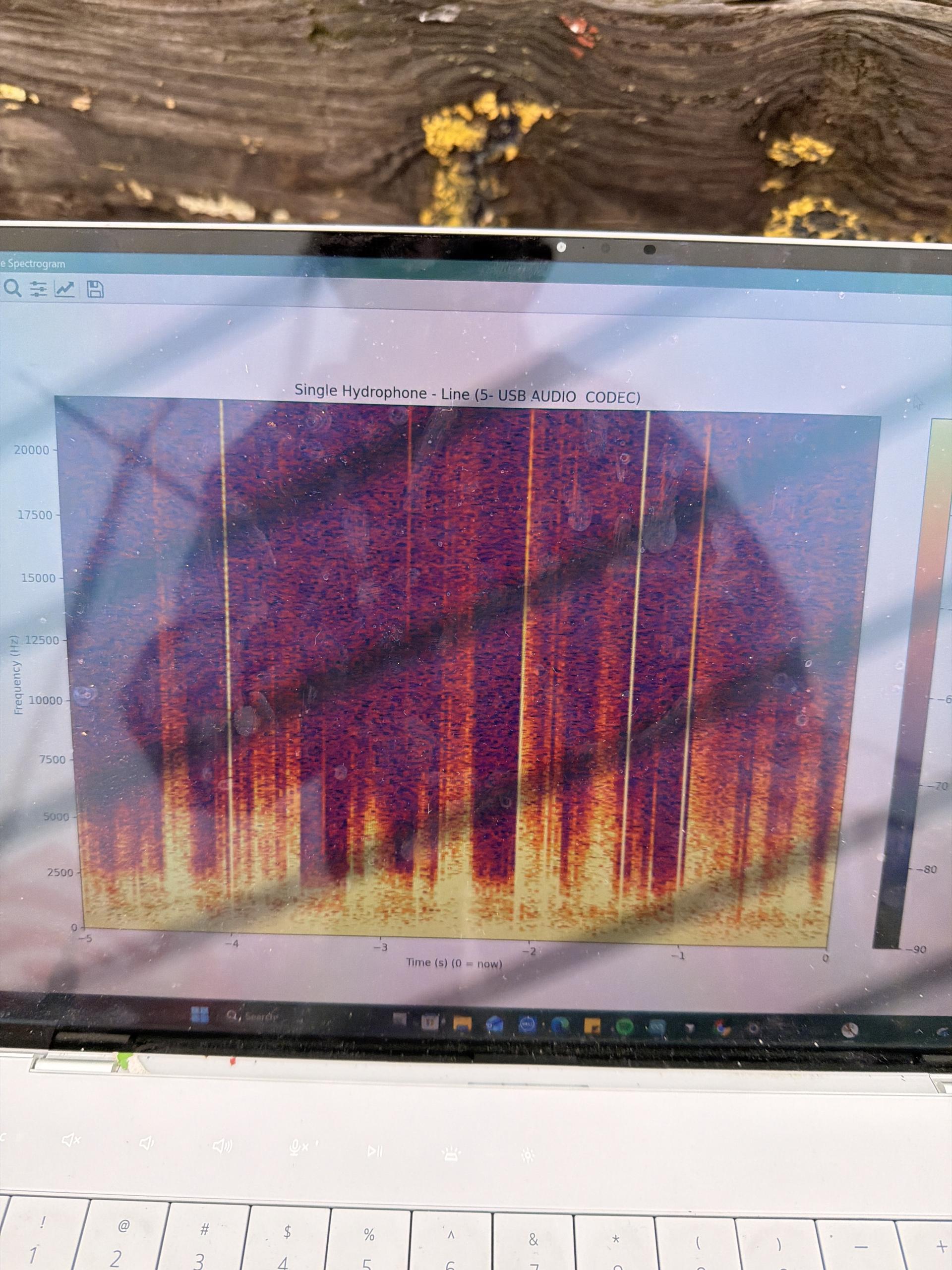
Hydrophone detection graph
Machining the anchor
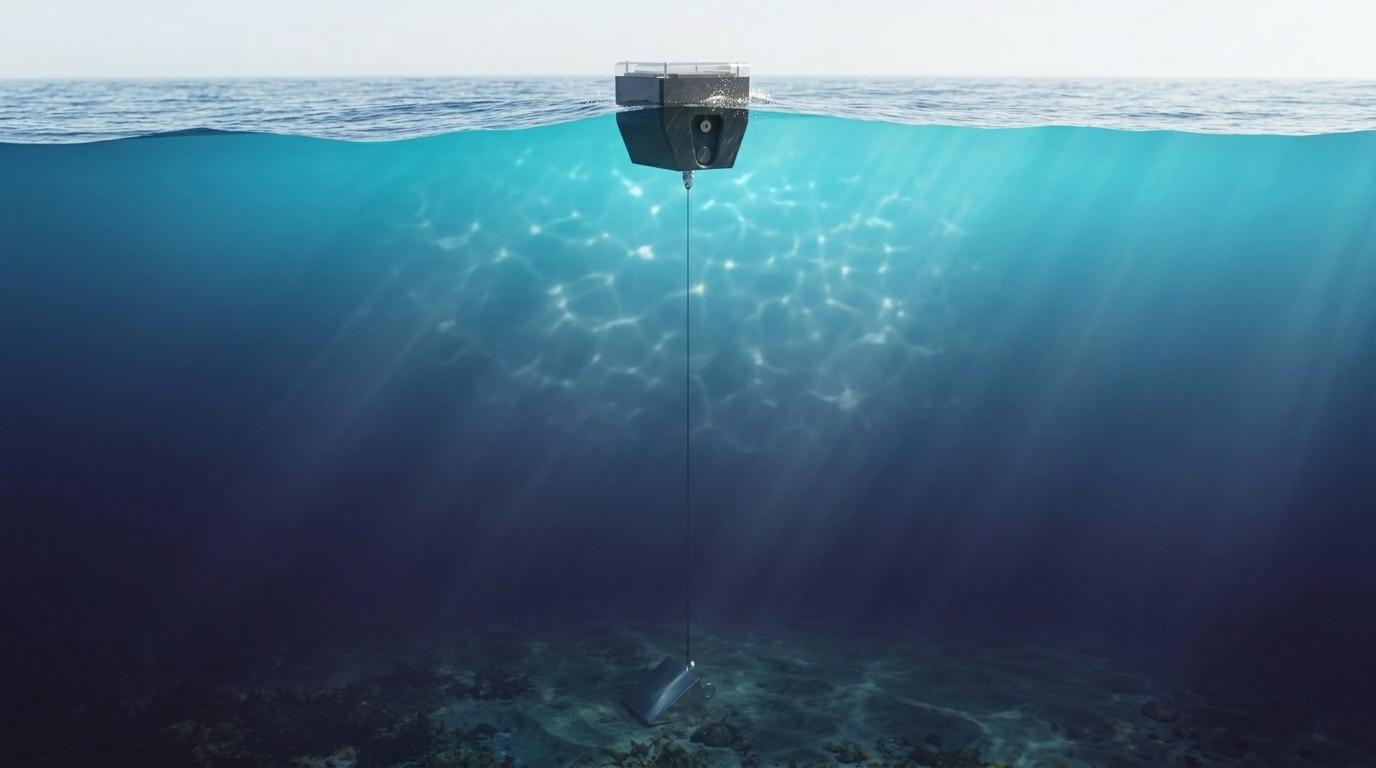
Underwater view render of V2
Finished 8-pound machined anchor
Tactical deployment case
Seawatch V2 with upgraded hydrophones
At the hackathon
Jago catching some sleep mid-hackathon